Efficient Global Optimization (EGO)¶
Bayesian Optimization¶
Bayesian optimization is defined by Jonas Mockus in [1] as an optimization technique based upon the minimization of the expected deviation from the extremum of the studied function.
The objective function is treated as a black-box function. A Bayesian strategy sees the objective as a random function and places a prior over it. The prior captures our beliefs about the behavior of the function. After gathering the function evaluations, which are treated as data, the prior is updated to form the posterior distribution over the objective function. The posterior distribution, in turn, is used to construct an acquisition function (often also referred to as infill sampling criterion) that determines what the next query point should be.
One of the earliest bodies of work on Bayesian optimisation that we are aware of are [2] and [3]. Kushner used Wiener processes for one-dimensional problems. Kushner’s decision model was based on maximizing the probability of improvement, and included a parameter that controlled the trade-off between ‘more global’ and ‘more local’ optimization, in the same spirit as the Exploration/Exploitation trade-off.
Meanwhile, in the former Soviet Union, Mockus and colleagues developed a multidimensional Bayesian optimization method using linear combinations of Wiener fields, some of which was published in English in [1]. This paper also describes an acquisition function that is based on myopic expected improvement of the posterior, which has been widely adopted in Bayesian optimization as the Expected Improvement function.
In 1998, Jones used Gaussian processes together with the expected improvement function to successfully perform derivative-free optimization and experimental design through an algorithm called Efficient Global Optimization, or EGO.
EGO¶
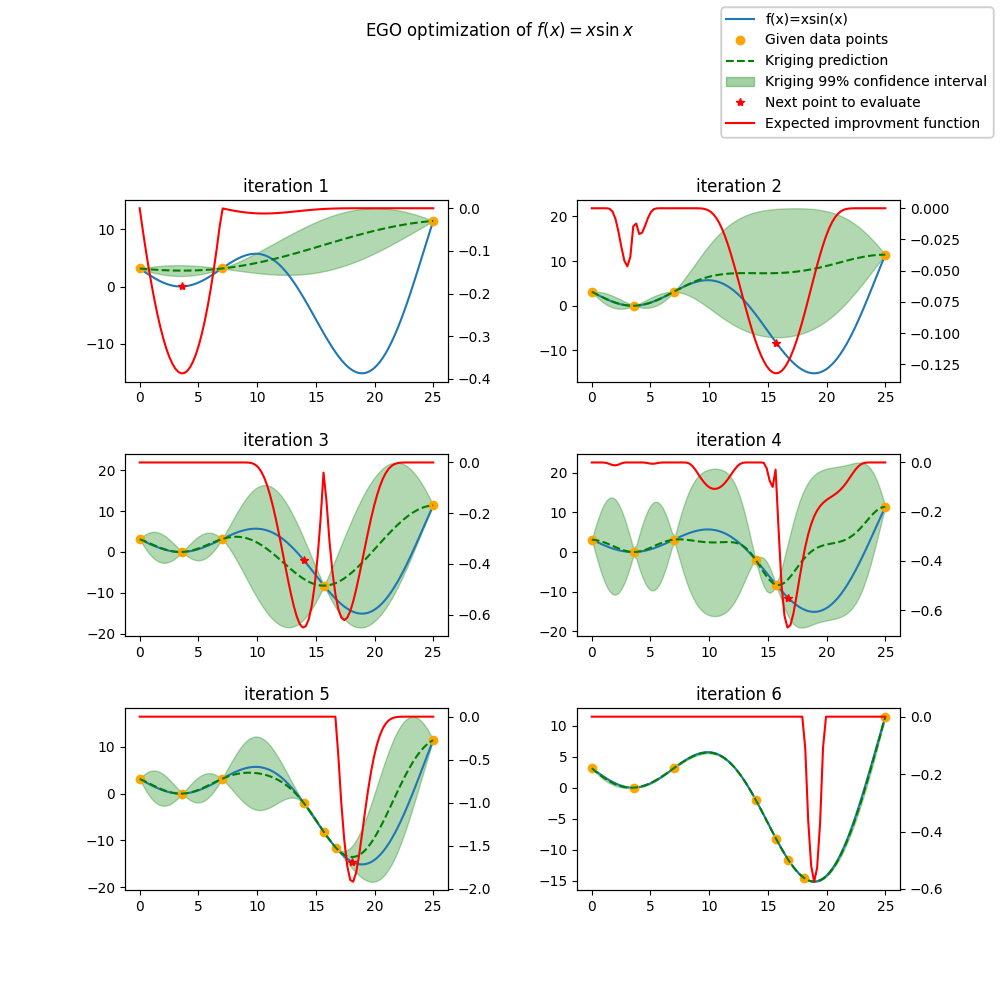
In what follows, we describe the Efficient Global Optimization (EGO) algorithm, as published in [4].
Let \(F\) be an expensive black-box function to be minimized. We sample \(F\) at the different locations \(X = \{x_1, x_2,\ldots,x_n\}\) yielding the responses \(Y = \{y_1, y_2,\ldots,y_n\}\). We build a Kriging model (also called Gaussian process) with a mean function \(\mu\) and a variance function \(\sigma^{2}\).
The next step is to compute the criterion EI. To do this, let us denote:
The Expected Improvement function (EI) can be expressed:
where \(Y\) is the random variable following the distribution \(\mathcal{N}(\mu(x), \sigma^{2}(x))\). By expressing the right-hand side of EI expression as an integral, and applying some tedious integration by parts, one can express the expected improvement in closed form:
where \(\Phi(\cdot)\) and \(\phi(\cdot)\) are respectively the cumulative and probability density functions of \(\mathcal{N}(0,1)\).
Next, we determine our next sampling point as :
We then test the response \(y_{n+1}\) of our black-box function \(F\) at \(x_{n+1}\), rebuild the model taking into account the new information gained, and research the point of maximum expected improvement again.
We summarize here the EGO algorithm:
EGO(F, \(n_{iter}\)) # Find the best minimum of \(\operatorname{F}\) in \(n_{iter}\) iterations
For (\(i=0:n_{iter}\))
\(mod = {model}(X, Y)\) # surrogate model based on sample vectors \(X\) and \(Y\)
\(f_{min} = \min Y\)
\(x_{i+1} = \arg \max {EI}(mod, f_{min})\) # choose \(x\) that maximizes EI
\(y_{i+1} = {F}(x_{i+1})\) # Probe the function at most promising point \(x_{i+1}\)
\(X = [X,x_{i+1}]\)
\(Y = [Y,y_{i+1}]\)
\(i = i+1\)
\(f_{min} = \min Y\)
Return : \(f_{min}\) # This is the best known solution after \(n_{iter}\) iterations.
More details can be found in [4].
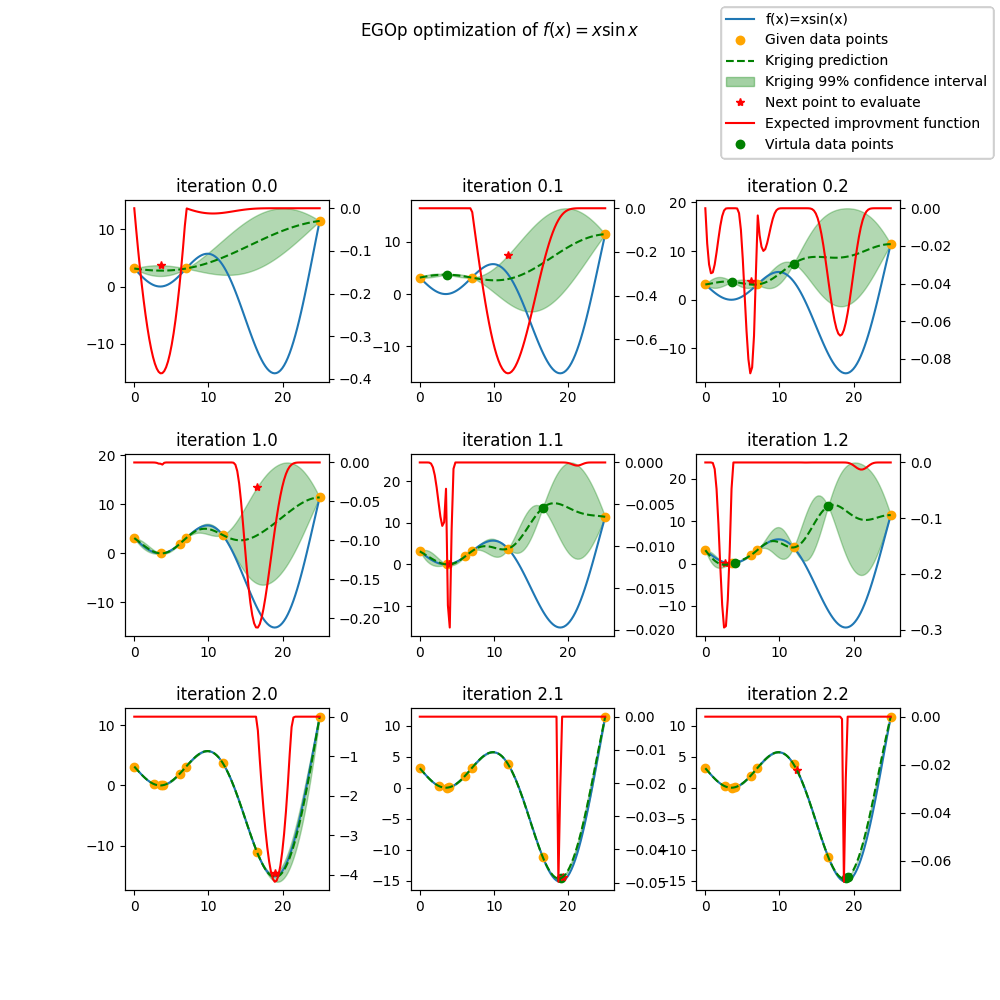
EGO parallel (EGO with qEI criterion)¶
The goal is to be able to run batch optimization. At each iteration of the algorithm, multiple new sampling points are extracted from the know ones. These new sampling points are then evaluated using a parallel computing environment.
The parallel version of this algorithm has been presented by Ginsbourger et al. [5] in 2010. The Expected improvement (EI) is extended to proposed q new sampling points instead of one, they called this criterion the qEI criterion. As the exact evaluation is not straightforward they proposed different ways to approximate this criterion.
Details of the implementation can be found in [6] [7].
Differents approximation strategy of the qEI criterion¶
The basic idea is to run \(q\) iterations of the EGO algorithm and to set temporally the response \(\hat y_q\) of the \(q\) new sampling points to a virtual value. When the \(q\) new sampling points are defined the real evaluation of the response \(y_q\) of these points is done in parallel. The efficiency of the methods lies in the strategy to set the virtual values.
Let assume that the new sampling point is at \(x_q\). The virtual response \(y_q\) is set according to one of those strategies:
The minimum constant liar (CLmin) strategy¶
\(\hat y_q = \min (Y)\)
The Kriging believer (KB) strategy¶
The Kriging model gives a mean function \(\mu\) and a variance function \(\sigma^2\) based on sample vectors \(X\) and \(Y\).
The virtual values are set according to the model prediction:
\(\hat y_q = \mu (x_q)\)
Some variants are proposed to introduce an optimistic or pessimistic part :
the Kriging Believer Upper Bound (KBUB) : \(\hat y_q = \mu (x_q) + 3 \sigma\)
the Kriging Believer Lower Bound (KBLB) : \(\hat y_q = \mu (x_q) - 3 \sigma\)
Tips for an efficient use¶
the n_parallel parameter is set by the user, a real improvement of the efficiency is observed for relatively low values of the parameter (<8) [3]
Since the maximization of the EI is a highly multimodal optimization problem, it could be necessary to increase the n_start parameter of the algorithm.
Implementation Notes¶
Beside the Expected Improvement, the implementation here offers two other infill criteria:
SBO (Surrogate Based Optimization): directly using the prediction of the surrogate model (\(\mu\))
LCB (Lower Confidence Bound): using the 99% confidence interval \(\mu -3 \times \sigma\)
Regarding the parallel execution, one can implement specific multiprocessing by deriving the _Evaluator_ interface and overriding the default implementation of the _run(fun, x)_ method. The default implementation simply runs _fun(x)_.
Regardless the others parameters, you can specify a mixed surrogate model to make mixed optimization. See [8] . The expected improvement is continuously computed and optimized so that can lead to an infill point that will be projected, in the mixed case, to an already evaluated point. To avoid the re-evaluation of a point, you can penalize the Expected Improvement via tunneling which decrease the EI in the neighbourhood of the known DOE points. However, this is not recommanded for high dimensional problems because the re-evaluation is uncommon. Tunneling evaluation can be slow with a lot of point.
When considering a mixed integer optimization, the function to be optimized by EGO
has to handle categorical variables as indexes in the given enumaration type. For instance,
with a categorical enumeration ["red", "green", "blue"], passing "blue" to the
function should be handled by passing the value 2 which is the index of "blue"
in the enumeration list. This choice was made to keep on using a numerical ndarray as interface
of the function to be optimized f: [n_samples, n_features] -> [n_eval, 1] allowing parallel
evaluations.
References¶
Usage¶
import matplotlib.pyplot as plt
import numpy as np
from smt.applications import EGO
from smt.design_space import DesignSpace
from smt.surrogate_models import KRG
def function_test_1d(x):
# function xsinx
import numpy as np
x = np.reshape(x, (-1,))
y = np.zeros(x.shape)
y = (x - 3.5) * np.sin((x - 3.5) / (np.pi))
return y.reshape((-1, 1))
n_iter = 6
xlimits = np.array([[0.0, 25.0]])
seed = 42 # for reproducibility
design_space = DesignSpace(xlimits, seed=seed)
xdoe = np.atleast_2d([0, 7, 25]).T
n_doe = xdoe.size
criterion = "EI" #'EI' or 'SBO' or 'LCB'
ego = EGO(
n_iter=n_iter,
criterion=criterion,
xdoe=xdoe,
surrogate=KRG(design_space=design_space, print_global=False),
seed=seed,
)
x_opt, y_opt, _, x_data, y_data = ego.optimize(fun=function_test_1d)
print("Minimum in x={:.1f} with f(x)={:.1f}".format(x_opt.item(), y_opt.item()))
x_plot = np.atleast_2d(np.linspace(0, 25, 100)).T
y_plot = function_test_1d(x_plot)
fig = plt.figure(figsize=[10, 10])
for i in range(n_iter):
k = n_doe + i
x_data_k = x_data[0:k]
y_data_k = y_data[0:k]
ego.gpr.set_training_values(x_data_k, y_data_k)
ego.gpr.train()
y_gp_plot = ego.gpr.predict_values(x_plot)
y_gp_plot_var = ego.gpr.predict_variances(x_plot)
y_ei_plot = -ego.EI(x_plot)
ax = fig.add_subplot((n_iter + 1) // 2, 2, i + 1)
ax1 = ax.twinx()
(ei,) = ax1.plot(x_plot, y_ei_plot, color="red")
(true_fun,) = ax.plot(x_plot, y_plot)
(data,) = ax.plot(
x_data_k, y_data_k, linestyle="", marker="o", color="orange"
)
if i < n_iter - 1:
(opt,) = ax.plot(
x_data[k], y_data[k], linestyle="", marker="*", color="r"
)
(gp,) = ax.plot(x_plot, y_gp_plot, linestyle="--", color="g")
sig_plus = y_gp_plot + 3 * np.sqrt(y_gp_plot_var)
sig_moins = y_gp_plot - 3 * np.sqrt(y_gp_plot_var)
un_gp = ax.fill_between(
x_plot.T[0], sig_plus.T[0], sig_moins.T[0], alpha=0.3, color="g"
)
lines = [true_fun, data, gp, un_gp, opt, ei]
fig.suptitle("EGO optimization of $f(x) = x \\sin{x}$")
fig.subplots_adjust(hspace=0.4, wspace=0.4, top=0.8)
ax.set_title("iteration {}".format(i + 1))
fig.legend(
lines,
[
"f(x)=xsin(x)",
"Given data points",
"Kriging prediction",
"Kriging 99% confidence interval",
"Next point to evaluate",
"Expected improvment function",
],
)
plt.show()
# Check the optimal point is x_opt=18.9, y_opt =-15.1
Minimum in x=18.9 with f(x)=-15.1
Usage with parallel options¶
import matplotlib.pyplot as plt
import numpy as np
from smt.applications import EGO
from smt.applications.ego import Evaluator
from smt.surrogate_models import KRG, DesignSpace
def function_test_1d(x):
# function xsinx
import numpy as np
x = np.reshape(x, (-1,))
y = np.zeros(x.shape)
y = (x - 3.5) * np.sin((x - 3.5) / (np.pi))
return y.reshape((-1, 1))
n_iter = 3
n_parallel = 3
n_start = 50
xlimits = np.array([[0.0, 25.0]])
seed = 42
design_space = DesignSpace(xlimits, seed=seed)
xdoe = np.atleast_2d([0, 7, 25]).T
n_doe = xdoe.size
class ParallelEvaluator(Evaluator):
"""
Implement Evaluator interface using multiprocessing ThreadPool object (Python 3 only).
"""
def run(self, fun, x, design_space=None):
n_thread = 5
# Caveat: import are made here due to SMT documentation building process
from multiprocessing.pool import ThreadPool
from sys import version_info
import numpy as np
if version_info.major == 2:
return fun(x)
# Python 3 only
with ThreadPool(n_thread) as p:
return np.array(
[
y[0]
for y in p.map(
fun, [np.atleast_2d(x[i]) for i in range(len(x))]
)
]
)
criterion = "EI" #'EI' or 'SBO' or 'LCB'
qEI = "KBUB" # "KB", "KBLB", "KBUB", "KBRand"
ego = EGO(
n_iter=n_iter,
criterion=criterion,
xdoe=xdoe,
surrogate=KRG(design_space=design_space, print_global=False),
n_parallel=n_parallel,
qEI=qEI,
n_start=n_start,
evaluator=ParallelEvaluator(),
seed=seed,
)
x_opt, y_opt, _, x_data, y_data = ego.optimize(fun=function_test_1d)
print("Minimum in x={:.1f} with f(x)={:.1f}".format(x_opt.item(), y_opt.item()))
x_plot = np.atleast_2d(np.linspace(0, 25, 100)).T
y_plot = function_test_1d(x_plot)
fig = plt.figure(figsize=[10, 10])
for i in range(n_iter):
k = n_doe + (i) * (n_parallel)
x_data_k = x_data[0:k]
y_data_k = y_data[0:k]
x_data_sub = x_data_k.copy()
y_data_sub = y_data_k.copy()
for p in range(n_parallel):
ego.gpr.set_training_values(x_data_sub, y_data_sub)
ego.gpr.train()
y_ei_plot = -ego.EI(x_plot)
y_gp_plot = ego.gpr.predict_values(x_plot)
y_gp_plot_var = ego.gpr.predict_variances(x_plot)
x_data_sub = np.append(x_data_sub, x_data[k + p])
y_KB = ego._get_virtual_point(np.atleast_2d(x_data[k + p]), y_data_sub)
y_data_sub = np.append(y_data_sub, y_KB)
ax = fig.add_subplot(n_iter, n_parallel, i * (n_parallel) + p + 1)
ax1 = ax.twinx()
(ei,) = ax1.plot(x_plot, y_ei_plot, color="red")
(true_fun,) = ax.plot(x_plot, y_plot)
(data,) = ax.plot(
x_data_sub[: -1 - p],
y_data_sub[: -1 - p],
linestyle="",
marker="o",
color="orange",
)
(virt_data,) = ax.plot(
x_data_sub[-p - 1 : -1],
y_data_sub[-p - 1 : -1],
linestyle="",
marker="o",
color="g",
)
(opt,) = ax.plot(
x_data_sub[-1], y_data_sub[-1], linestyle="", marker="*", color="r"
)
(gp,) = ax.plot(x_plot, y_gp_plot, linestyle="--", color="g")
sig_plus = y_gp_plot + 3.0 * np.sqrt(y_gp_plot_var)
sig_moins = y_gp_plot - 3.0 * np.sqrt(y_gp_plot_var)
un_gp = ax.fill_between(
x_plot.T[0], sig_plus.T[0], sig_moins.T[0], alpha=0.3, color="g"
)
lines = [true_fun, data, gp, un_gp, opt, ei, virt_data]
fig.suptitle("EGOp optimization of $f(x) = x \\sin{x}$")
fig.subplots_adjust(hspace=0.4, wspace=0.4, top=0.8)
ax.set_title("iteration {}.{}".format(i, p))
fig.legend(
lines,
[
"f(x)=xsin(x)",
"Given data points",
"Kriging prediction",
"Kriging 99% confidence interval",
"Next point to evaluate",
"Expected improvment function",
"Virtula data points",
],
)
plt.show()
Minimum in x=19.0 with f(x)=-15.1
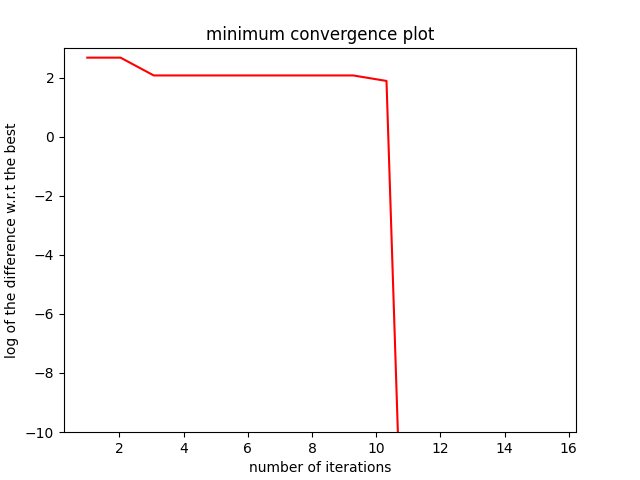
Usage with mixed variable¶
import matplotlib.pyplot as plt
import numpy as np
from smt.applications import EGO
from smt.applications.mixed_integer import MixedIntegerContext
from smt.design_space import (
CategoricalVariable,
DesignSpace,
FloatVariable,
IntegerVariable,
)
from smt.surrogate_models import KRG, MixIntKernelType
# Regarding the interface, the function to be optimized should handle
# categorical values as index values in the enumeration type specification.
# For instance, here "blue" will be passed to the function as the index value 2.
# This allows to keep the numpy ndarray X handling numerical values.
def function_test_mixed_integer(X):
# float
x1 = X[:, 0]
# enum 1
c1 = X[:, 1]
x2 = c1 == 0
x3 = c1 == 1
x4 = c1 == 2
# enum 2
c2 = X[:, 2]
x5 = c2 == 0
x6 = c2 == 1
# int
i = X[:, 3]
y = (
(x2 + 2 * x3 + 3 * x4) * x5 * x1
+ (x2 + 2 * x3 + 3 * x4) * x6 * 0.95 * x1
+ i
)
return y.reshape((-1, 1))
n_iter = 15
seed = 42
design_space = DesignSpace(
[
FloatVariable(-5, 5),
CategoricalVariable(["blue", "red", "green"]),
CategoricalVariable(["square", "circle"]),
IntegerVariable(0, 2),
],
seed=seed,
)
criterion = "EI" #'EI' or 'SBO' or 'LCB'
qEI = "KBRand"
sm = KRG(
design_space=design_space,
categorical_kernel=MixIntKernelType.GOWER,
hyper_opt="Cobyla",
print_global=False,
)
mixint = MixedIntegerContext(design_space)
n_doe = 3
sampling = mixint.build_sampling_method(seed=seed)
xdoe = sampling(n_doe)
ydoe = function_test_mixed_integer(xdoe)
ego = EGO(
n_iter=n_iter,
criterion=criterion,
xdoe=xdoe,
ydoe=ydoe,
surrogate=sm,
qEI=qEI,
n_parallel=2,
seed=seed,
)
x_opt, y_opt, _, _, y_data = ego.optimize(fun=function_test_mixed_integer)
print("Minimum in x={} with f(x)={:.1f}".format(x_opt, y_opt.item()))
# print("Minimum in typed x={}".format(ego.mixint.cast_to_mixed_integer(x_opt)))
min_ref = -15
mini = np.zeros(n_iter)
for k in range(n_iter):
mini[k] = np.log(np.abs(np.min(y_data[0 : k + n_doe - 1]) - min_ref))
x_plot = np.linspace(1, n_iter + 0.5, n_iter)
up = max(np.floor(max(mini)) + 1, -100)
lo = max(np.floor(min(mini)) - 0.2, -10)
fig = plt.figure()
axes = fig.add_axes([0.1, 0.1, 0.8, 0.8])
axes.plot(x_plot, mini, color="r")
axes.set_ylim([lo, up])
plt.title("minimum convergence plot", loc="center")
plt.xlabel("number of iterations")
plt.ylabel("log of the difference w.r.t the best")
plt.show()
Minimum in x=[-5. 2. 1. 0.] with f(x)=-14.2
Options¶
Option |
Default |
Acceptable values |
Acceptable types |
Description |
|---|---|---|---|---|
fun |
None |
None |
[‘function’] |
Function to minimize |
criterion |
EI |
[‘EI’, ‘SBO’, ‘LCB’] |
[‘str’] |
criterion for next evaluation point determination: Expected Improvement, Surrogate-Based Optimization or Lower Confidence Bound |
n_iter |
None |
None |
[‘int’] |
Number of optimizer steps |
n_max_optim |
20 |
None |
[‘int’] |
Maximum number of internal optimizations |
n_start |
20 |
None |
[‘int’] |
Number of optimization start points |
n_parallel |
1 |
None |
[‘int’] |
Number of parallel samples to compute using qEI criterion |
qEI |
KBLB |
[‘KB’, ‘KBLB’, ‘KBUB’, ‘KBRand’, ‘CLmin’] |
[‘str’] |
Approximated q-EI maximization strategy |
evaluator |
<smt.applications.ego.Evaluator object at 0x000001AD7D2F7490> |
None |
[‘Evaluator’] |
Object used to run function fun to optimize at x points (nsamples, nxdim) |
n_doe |
None |
None |
[‘int’] |
Number of points of the initial LHS doe, only used if xdoe is not given |
xdoe |
None |
None |
[‘ndarray’] |
Initial doe inputs |
ydoe |
None |
None |
[‘ndarray’] |
Initial doe outputs |
verbose |
False |
None |
[‘bool’] |
Print computation information |
enable_tunneling |
False |
None |
[‘bool’] |
Enable the penalization of points that have been already evaluated in EI criterion |
is_ri |
False |
None |
[‘bool’] |
Enable to re interpolate the variance for training points |
surrogate |
<smt.surrogate_models.krg.KRG object at 0x000001AD7DC3DB50> |
None |
[‘KRG’, ‘KPLS’, ‘KPLSK’, ‘GEKPLS’, ‘MGP’, ‘GPX’] |
SMT kriging-based surrogate model used internaly |
seed |
None |
None |
[‘NoneType’, ‘int’, ‘Generator’] |
Numpy Generator object or seed number which controls random draws |