GPX¶
GPX is a rewrite of Kriging (aka KRG) and KPLS models of SMT in Rust. Actually GPX is a wrapper of the Gpx model from the egobox library which is adapted here to the surrogate models API of SMT.
If you find the performances of the Python implementation (training/prediction time) not sufficient for your use case, you may want to give GPX a try.
You will need to install the egobox extra dependency with the command: pip install smt[gpx]
More information about the egobox library can be found in [1].
Limitations¶
wrt KRG/KPLS: GPX does not implement mixed integer or hierarchical variables, derivatives, noise handling or KRG sampling.
wrt egobox::Gpx: GPX does not give access to mixture of gaussian processes, does not give access to GP sampling
See [2] for more information on egobox::Gpx.
Reference¶
Usage¶
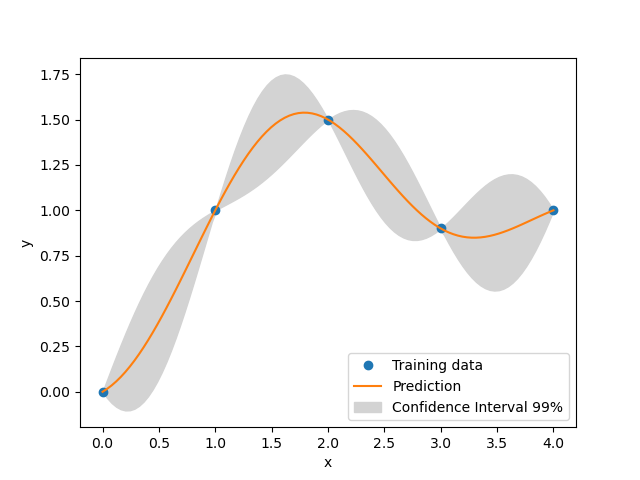
Example¶
import matplotlib.pyplot as plt
import numpy as np
from smt.surrogate_models import GPX
xt = np.array([0.0, 1.0, 2.0, 3.0, 4.0])
yt = np.array([0.0, 1.0, 1.5, 0.9, 1.0])
sm = GPX(theta0=[1e-2])
sm.set_training_values(xt, yt)
sm.train()
num = 100
x = np.linspace(0.0, 4.0, num)
y = sm.predict_values(x)
# estimated variance
s2 = sm.predict_variances(x)
_, axs = plt.subplots(1)
# add a plot with variance
axs.plot(xt, yt, "o")
axs.plot(x, y)
axs.fill_between(
np.ravel(x),
np.ravel(y - 3 * np.sqrt(s2)),
np.ravel(y + 3 * np.sqrt(s2)),
color="lightgrey",
)
axs.set_xlabel("x")
axs.set_ylabel("y")
axs.legend(
["Training data", "Prediction", "Confidence Interval 99%"],
loc="lower right",
)
plt.show()
___________________________________________________________________________
GPX
___________________________________________________________________________
Problem size
# training points. : 5
___________________________________________________________________________
Training
Training ...
Training - done. Time (sec): 0.0496194
___________________________________________________________________________
Evaluation
# eval points. : 100
Predicting ...
Predicting - done. Time (sec): 0.0000000
Prediction time/pt. (sec) : 0.0000000
___________________________________________________________________________
Evaluation
# eval points. : 100
Predicting ...
Predicting - done. Time (sec): 0.0000000
Prediction time/pt. (sec) : 0.0000000
Options¶
Option |
Default |
Acceptable values |
Acceptable types |
Description |
|---|---|---|---|---|
print_global |
True |
None |
[‘bool’] |
Global print toggle. If False, all printing is suppressed |
print_training |
True |
None |
[‘bool’] |
Whether to print training information |
print_prediction |
True |
None |
[‘bool’] |
Whether to print prediction information |
print_problem |
True |
None |
[‘bool’] |
Whether to print problem information |
print_solver |
True |
None |
[‘bool’] |
Whether to print solver information |
poly |
constant |
[‘constant’, ‘linear’, ‘quadratic’] |
[‘str’] |
Regression function type |
corr |
squar_exp |
[‘abs_exp’, ‘squar_exp’, ‘matern32’, ‘matern52’] |
None |
Correlation function type |
theta0 |
[0.01] |
None |
[‘list’, ‘ndarray’] |
Initial hyperparameters |
theta_bounds |
[1e-06, 20.0] |
None |
[‘list’, ‘ndarray’] |
Bounds for hyperparameters |
n_start |
10 |
None |
[‘int’] |
Number of optimizer runs (multistart method) |
kpls_dim |
None |
None |
[‘NoneType’, ‘int’] |
Number of PLS components used for dimension reduction |
seed |
42 |
None |
[‘int’] |
Seed number which controls random draws for internal optim (set by default to get reproductibility) |
xlimits |
None |
None |
[‘list’, ‘ndarray’] |
definition of a design space of float (continuous) variables: array-like of size nx x 2 (lower, upper bounds) |
design_space |
None |
None |
[‘BaseDesignSpace’, ‘list’, ‘ndarray’] |
definition of the (hierarchical) design space: use smt.design_space.DesignSpace as the main API. Also accepts list of float variable bounds |